ALW - Robotizované pracoviště kontroly a apretace
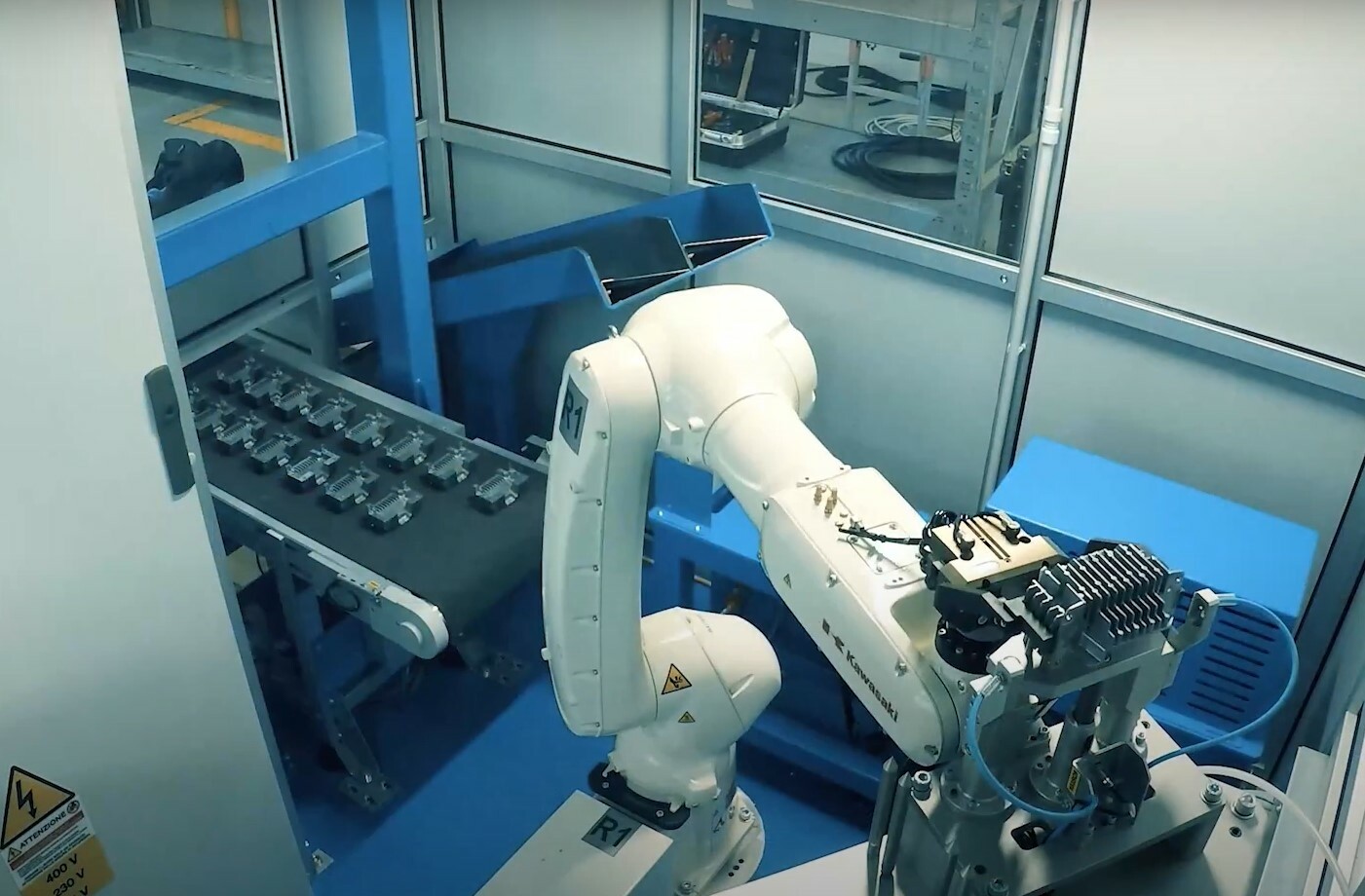
Projekt kompletního robotizovaného pracoviště s roboty KAWASAKI ve společnosti ALW Industry byl zaměřen na vytvoření robotické buňky, kde první robot provádí odeběr založených odlitků obsluhou s následnou 2D vizuální kontrolou vad odlitku. Druhý robot následně provádí finální apretaci povrchu odlitku. Integrace pracoviště byla zajištěna italskou společností TIESSE ROBOT - KAWASAKI.
Pracoviště přináší významné snížení až kompletní odstranění externí zmetkovitosti, což bylo zákazníkem potvrzeno. Vizuální kontrola vad tlakového odlitku pomocí vysoce efektivních 2D kamer s pomocí robota Kawasaki zajišťuje stabilitu a jistotu kontroly odlitků při vysoké rychlosti kontroly oproti původnímu stavu, kdy se kontrola prováděla manuálně s více pracovníky, kde je těžké vždy zachytit všechny vady odlitků vlivem lidského faktoru.
Kontrola vad zahrnuje konkrétní počet kontrolovaných možných povrchových vad. V balíku kontrolovaných vad jsou také přidruženy ty, které jsou opravitelné. V případě zjištění neshody, je daný odlitek odložen robotem na skluz pro neshodné výrobky. V případě opravitelné vady je kus odložen na druhý skluz, které přívádí odlitky k opravě. Celý systém s oblužným panelem na řídícím PC umožňuje kompletní statistiku vad, dle druhů a četnosti výskytu, což slévárně přináší velmi užitečné informace pro budoucí eliminaci výskytu těch nejčastějších vad.
Shrnutí přínosů
- výrazné zvýšení rychlosti kontroly odlitků
- stabilita při kontrole vad a snížení až kompletní eliminace externí zmetkovitosti
- vyřešení problémů s nedostatkem personálu na pracovišti kontroly a apretace
- kvalita a stabilita provedené apretace
- zvýšení prestiže firmy a možnost zisku zajímavých zakázek odlitků