
Robotická montáž konektorů


Aplikace průmyslových robotů při montážních pracech lze často řadit také do manipulačních aplikací - pro tyto účely se využívají manipulační roboti řad RS, BX atd. Je ale velmi časté využití kolaborativních robotů, pokud se jedná o manipulace menších dílců, např. při montáži v elektrotechnice, atd. Ukázka pracoviště montáže konektorů s kolaborativním robotem duAro 1 je zde uvedena.
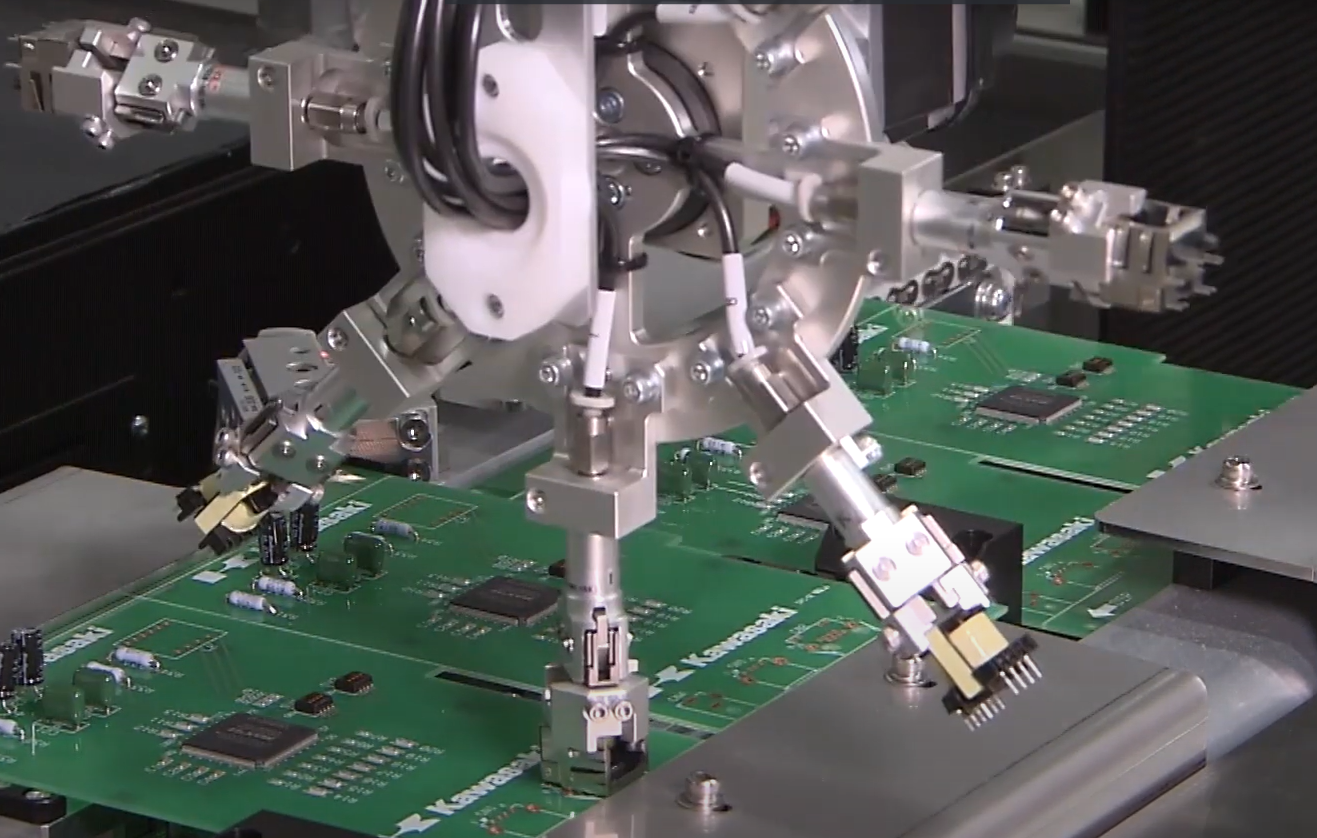
Charakteristika aplikace montáže s robotem duAro 1
- montáž konektorů plošných spojů, konkrétně fixace konektorů na plošný spoj
- je použit dvouramenný kolaborativní robot duAro 1 s nosností 2 kg
- konektory do pracoviště vstupují ze zásobníku, ze kterých je robot odebírá
- robot je vybaven spec. rotačním chapdalem pro uchycení více konektorů
- robot poté konektory připevňuje na plošné spoje, položené na dopravníku před robotem
- touto aplikací došlo ke snížení cyklového času na 1 kus o 2 s
Charakteristika robota duAro 1
- 4 osy pro každé rameno
- dosah 760 mm
- nosnost 2 kg v každém zápěstí ramene
- jednoduché programování na tabletu
- vedení a přemístění ramena robota manuálně programátorem
- absence oplocení pracoviště
